



Les limites des techniques conventionnelles ont été améliorées à maintes reprises pour obtenir de bien meilleurs résultats. L’une des technologies et méthodes améliorées est appelée prothèse totale du genou ou TKP en abrégé. Elle remplace les surfaces articulaires endommagées du fémur, du tibia et de la rotule. Elle réduit considérablement le risque de désalignement, même si elle allonge l’opération de quelques minutes. La prochaine étape sera, semble-t-il, un bras robotisé piloté par ordinateur qui effectuera des coupes osseuses avec une précision incroyable et toujours plus grande.
Pour en savoir plus sur la prochaine évolution dans ce domaine, lisez l’article du professeur Olivier Guyen.
Les prothèses totales de genou (PTG) sont pratiquées de plus en plus fréquemment en Suisse, en raison du vieillissement de la population, de l’augmentation de la prévalence de l’arthrose et de l’obésité, et de l’augmentation de l’offre de soins. Ces interventions permettent d’obtenir régulièrement une indolence et d’excellents résultats sur la fonction articulaire. Cependant, malgré ces excellents résultats, environ 20% des patients restent incomplètement satisfaits car le résultat fonctionnel n’atteint pas leurs attentes et/ou des douleurs persistent. Il est clairement établi que le succès d’une PTG est étroitement lié à la précision du positionnement des implants.
A l’heure où la qualité des matériaux et le design des implants ont atteint un niveau de performance très élevé, la précision du geste chirurgical reste un facteur majeur contribuant au succès. Les techniques d’implantation standards ou « conventionnelles » se sont progressivement perfectionnées, et font appel à une instrumentation dite « mécanique ». Cette dernière est conçue pour permettre au chirurgien de réaliser différentes coupes osseuses conformément à une planification pré-opératoire. De ces coupes osseuses dépendront le positionnement des implants. Le chirurgien a pour objectif, grâce à cette instrumentation « mécanique », de reproduire la planification pré-opératoire à l’aide de repères visuels ou palpatoires osseux ou positionnés sur l’instrumentation elle-même. Ces repères sont à la libre appréciation de l’opérateur qui les valide de manière empirique. Compte tenu de ces éléments, un risque d’imprécision existe, et l’expérience de l’opérateur prend toute son importance.
Les limites des techniques conventionnelles ont conduit au développement d’alternatives, faisant largement appel à l’informatique et aux progrès technologiques afin d’optimiser la précision de l’implantation et les résultats à long terme.
Deux principales technologies ont émergé : les guides de coupe sur mesure, et la navigation chirurgicale.
Ces deux technologies, bien qu’ayant un objectif identique, s’opposent par leur concept :
• les guides de coupe sur mesure sont élaborés avant l’intervention, à partir d’une imagerie pré-opératoire (IRM ou scanner). Une reconstruction tridimensionnelle de l’articulation est obtenue, à partir de laquelle la taille et le positionnement des implants est simulée sur un logiciel. Une fois validée par le chirurgien, la planification sert à l’élaboration par impression 3D de blocs se positionnant à la surface du fémur et du tibia (dont ils épousent parfaitement la forme). Ces blocs sont pourvus d’une fente guidant la lame de scie lors des coupes osseuses, orientée conformément à la planification. Une fois les guides de coupe confectionnés, ils sont conditionnés stérilement et livrés pour l’intervention. Il est important de ne pas confondre cette technologie avec les implants sur mesure, dont le concept est totalement différent. Si le concept de guides sur mesure est séduisant, il présente deux principaux inconvénients : celui de laisser très peu de possibilité d’adaptation pendant l’intervention si les conditions diffèrent de celles prises en compte lors de la planification, et celui de ne pas fournir de données en temps réel pendant l’intervention. En effet, une fois la coupe effectuée au travers du guide, le chirurgien n’a pas de moyen de s’assurer que la coupe est conforme à la planification, en dehors d’un simple contrôle visuel.
• la navigation chirurgicale consiste à introduire en salle d’opération un ordinateur couplé à des caméras infra-rouges qui vont suivre en temps réel le positionnement dans l’espace (au millimètre et au degré près) des pièces osseuses, de l’instrumentation, et des implants (Figure 1).

A la différence des guides de coupe sur mesure, la navigation permet de s’affranchir d’une imagerie pré-opératoire tridimensionnelle. Les données morphologiques de l’articulation sont acquises pendant l’intervention, par la palpation directe des surfaces osseuses. Ceci explique que la navigation allonge d’une dizaine de minutes la durée opératoire. Ces données permettent à l’ordinateur d’effectuer une reconstruction tridimensionnelle instantanée. Le chirurgien a accès en temps réel à des données statiques (dimensionnement en 3D, analyse des axes) mais également dynamiques (amplitudes de mobilité, suivi du déplacement de la rotule, degré de tension ligamentaire). Ce système autorise un contrôle des coupes osseuses réalisées par comparaison aux coupes planifiées, et offre la possibilité de correction. De même, le positionnement des implants peut être ajusté à tout moment en fonction des constatations pendant l’intervention, laissant une grande capacité d’adaptation.
Ainsi, de la même façon qu’un GPS de voiture aide le conducteur à atteindre sa destination en lui indiquant des informations en temps réel tout au long de son trajet, le système de navigation aide le chirurgien à reproduire la planification pré-opératoire, en lui livrant des informations en temps réel à chaque étape de la chirurgie. Au terme de la procédure, toutes les étapes sont enregistrées et accessibles.
So wie das GPS eines Autos dem Fahrer hilft, sein Ziel zu erreichen, indem es unterwegs Informationen in Echtzeit liefert, so hilft das Navigationssystem dem Chirurgen bei der Reproduktion der präoperativen Planung, indem es bei jedem Schritt der Operation Informationen in Echtzeit liefert. Am Ende des Verfahrens werden alle Schritte aufgezeichnet und zugänglich gemacht.
La navigation des prothèses totales de genou
L’articulation du genou permet essentiellement des mouvements de flexion et extension, et doit rester stable au cours du mouvement. La rotule, située en avant du genou, glisse sur la face antérieure de la partie distale (basse) du fémur et son déplacement est appelé « course rotulienne ».
Le principe d’une prothèse totale du genou (PTG) est de réaliser un remplacement des surfaces articulaires endommagées au niveau du fémur, du tibia, et de façon optionnelle au niveau de la rotule. Les ligaments périphériques collatéraux (médial et latéral) sont préservés tandis que les ligaments croisés (antérieur et postérieur) sont le plus souvent sacrifiés.
Les coupes osseuses du tibia et du fémur doivent être réalisées selon des critères précis pour obtenir l’alignement post-opératoire planifié. Toutefois, l’alignement n’est pas le seul paramètre qui garantit le résultat d’une PTG. Les implants doivent également être précisément dimensionnés, et il est nécessaire d’obtenir un degré de tension équilibré entre les deux ligaments collatéraux, tant en extension qu’en flexion. Il s’agit de l’équilibrage ligamentaire, qui garantit une bonne stabilité articulaire au cours des mouvements de flexion/extension. Enfin, la rotule, que sa surface articulaire soit conservée ou remplacée, doit rester centrée en face de l’implant fémoral lors de la flexion/extension.
Une PTG ne donnera satisfaction sur le plan fonctionnel et des douleurs que si l’ensemble de ces paramètres sont maîtrisés.
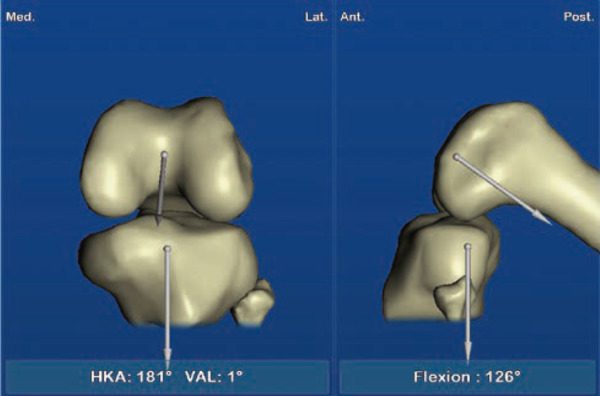
La navigation été introduite à la fin des années 1990 pour les PTG avec pour but d’optimiser le contrôle de ces différents paramètres. Le principe est d’acquérir des données morphologiques du tibia et du fémur pendant l’intervention, par une simple palpation des surfaces osseuses. Le logiciel va effectuer une reconstruction tridimensionnelle de l’articulation, et proposera une taille d’implant pour le fémur et pour le tibia. Le système va déterminer les amplitudes de flexion/extension du genou avant la mise en place des implants (Figure 2), ainsi le degré de tension respectif des ligaments collatéraux médial et latéral. Il va ensuite guider le chirurgien pour effectuer les coupes osseuses au tibia et au fémur de façon à reproduire l’alignement désiré du membre inférieur. La navigation permet de contrôler en temps réel et si besoin de corriger une coupe osseuse. Elle permet également de contrôler le degré de tension entre les 2 ligaments collatéraux en extension et en flexion afin de garantir une stabilité prothétique. Enfin, le système de navigation aide le chirurgien à positionner le composant fémoral pour optimiser la course rotulienne lors de la flexion/extension.
La navigation des PTG permet donc un contrôle précis, objectif, et en temps réel de l’ensemble des paramètres qui conditionnent le résultat fonctionnel d’une PTG (Figure 3). Cette technologie permet donc d’espérer une optimisation des résultats fonctionnels et de la longévité des PTG à long terme.
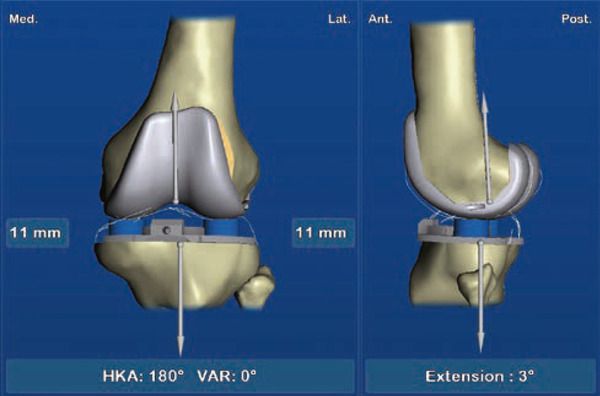
de l’extension obtenue et de l’équilibrage ligamentaire en extension.
Les données les plus récentes de la littérature ont montré une diminution significative du risque de défaut d’alignement avec la navigation (réduction des « outliers »), ainsi qu’une meilleure reproductibilité du positionnement des implants. En outre, les données du registre Australien montrent une réduction significative du risque de révision de PTG chez les sujets jeunes ayant bénéficié d’une PTG par navigation. Enfin, une revue récente de la littérature (2020) montre des scores de satisfaction légèrement supérieurs pour les patients ayant bénéficié d’une PTG par navigation. Des données à plus long recul sont encore nécessaires.
Conclusion
La navigation est une technologie qui répond avec précision et fiabilité aux limites des instrumentations standards « mécaniques ». Ses évolutions (miniaturisation des dispositifs, ergonomie, convivialité des logiciels) au cours de la dernière décennie l’ont rendue plus attractive. Si elle allonge de quelques minutes la durée opératoire, elle présente l’avantage de sécuriser le geste opératoire par un contrôle en temps réel des différents paramètres pour aider le chirurgien à atteindre l’objectif fixé lors de la planification pré-opératoire.
Les données récentes de la littérature confirment l’intérêt de la navigation pour réduire significativement le risque d’erreur d’alignement. Des données encourageantes émergent, rapportant un risque de révision moindre pour les PTG implantées avant 65 ans par navigation, et des résultats fonctionnels légèrement supérieurs à ceux obtenus avec des systèmes conventionnels.
A l’heure où l’informatique et les innovations technologiques ont envahi notre quotidien, dans nos maisons comme au cours de nos déplacements, il n’y a rien de surprenant à voir entrer les ordinateurs dans les blocs opératoires…
Cette évolution ouvre des perspectives prochaines prometteuses, en particulier le développement de systèmes de navigation dits « actifs », où la navigation peut être couplée à un bras robotisé pour l’exécution des coupes osseuses avec des niveaux de précision toujours plus performants, dans l’espoir de toujours améliorer le service rendu aux patients.
Fazit
Navigationsunterstützung ist eine Technik, die mit Präzision und Zuverlässigkeit auf die Grenzen der «mechanischen» Standardinstrumente reagiert. Ihre Weiterentwicklung (Miniaturisierung der Instrumente, Ergonomie, Benutzerfreundlichkeit der Software) in den letzten zehn Jahren hat ihre Attraktivität erhöht. Obwohl sie die Operationszeit um einige Minuten verlängert, hat sie den Vorteil, den chirurgischen Eingriff sicherer zu gestalten, indem sie die verschiedenen Parameter in Echtzeit kontrolliert, um dem Chirurgen zu helfen, das bei der präoperativen Planung gesetzte Ziel zu erreichen.
Jüngste Daten in der Literatur bestätigen den Wert der Navigationsunterstützung bei der signifikanten Reduzierung des Risikos von Ausrichtungsfehlern. Es zeichnen sich ermutigende Daten ab, die von einem geringeren Revisionsrisiko für TKP berichten, die vor dem 65. Lebensjahr mit Navigationsunterstützung implementiert wurden, und von geringfügig besseren funktionellen Ergebnissen als die mit herkömmlichen Systemen erzielten.
In einer Zeit, in der Computer und technische Innovationen in unser tägliches Leben eingedrungen sind, sowohl zu Hause als auch unterwegs, ist es nicht überraschend, Computer in Operationssälen zu sehen…
Diese Entwicklung eröffnet vielversprechende Zukunftsperspektiven, insbesondere die Entwicklung so genannter «aktiver» Navigationssysteme, bei denen die Navigation mit einem Roboterarm gekoppelt werden kann, um Knochenschnitte mit immer höherer Präzision durchzuführen, in der Hoffnung, den Service für die Patienten ständig zu verbessern.







0 commentaires